《六軸機(jī)器人KUKA-KR200機(jī)器人運(yùn)動(dòng)控制方式》由會(huì)員分享����,可在線閱讀�,更多相關(guān)《六軸機(jī)器人KUKA-KR200機(jī)器人運(yùn)動(dòng)控制方式(2頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
1��、KUKA-KR200機(jī)器人運(yùn)動(dòng)控制方式
機(jī)器人控制系統(tǒng)要對(duì)單軸或是多軸進(jìn)行協(xié)調(diào)控制�����, 雖然軸的組成形式千變?nèi)f化��, 不一而
足�,而軸的結(jié)構(gòu)形式也不盡相同。但從控制功能角度上控制系統(tǒng)的種類如下 :
1?點(diǎn)位置控制(Point to Point Control����,即 PTP 控制)
點(diǎn)位置控制方式為了滿足一定的任務(wù)質(zhì)量要求, 要保證末端執(zhí)行器盡量接近目標(biāo)點(diǎn)��, 對(duì)
如何達(dá)到目標(biāo)點(diǎn)則沒(méi)有任何限制��。 點(diǎn)位置控制方式容易實(shí)現(xiàn)���, 但定位精度比較低�����。 這種控制
方式的特點(diǎn)是:僅需保證終點(diǎn)和若干個(gè)中間點(diǎn)的位姿在一定精度范圍內(nèi)��、運(yùn)動(dòng)速度比較快�����、 控制方式相對(duì)簡(jiǎn)單����。點(diǎn)位置運(yùn)動(dòng)控制一般用于機(jī)器人運(yùn)動(dòng)軌跡固定�����,
2��、 要到達(dá)或經(jīng)過(guò)特定的參
照點(diǎn)的場(chǎng)合�����,如在機(jī)器人點(diǎn)焊工藝中使用�。
初始點(diǎn) 目標(biāo)點(diǎn)
圖2-2點(diǎn)到史的榕創(chuàng)
Figure 2-2 P omt: to P oiiit Move me tit
2. 不間斷路徑控制(Continuous Path Control�, CP 控制)
不間斷路徑控制方式中機(jī)器人的執(zhí)行機(jī)構(gòu)要按照一定精度和速度要求�����, 沿著預(yù)定的軌運(yùn)
動(dòng)�。機(jī)器人的每個(gè)關(guān)節(jié)要同步、連續(xù)地按照預(yù)定的軌跡運(yùn)動(dòng)才能順利的完成任務(wù)�����。 連續(xù)路徑
控制方式中機(jī)器人在保證運(yùn)動(dòng)平穩(wěn)的同時(shí)還要滿足所規(guī)劃的路徑經(jīng)過(guò)點(diǎn)的位姿精度要求���, 因
此控制方式比較復(fù)雜�。主要用于噴漆���、切割��、弧焊作業(yè)中�����。
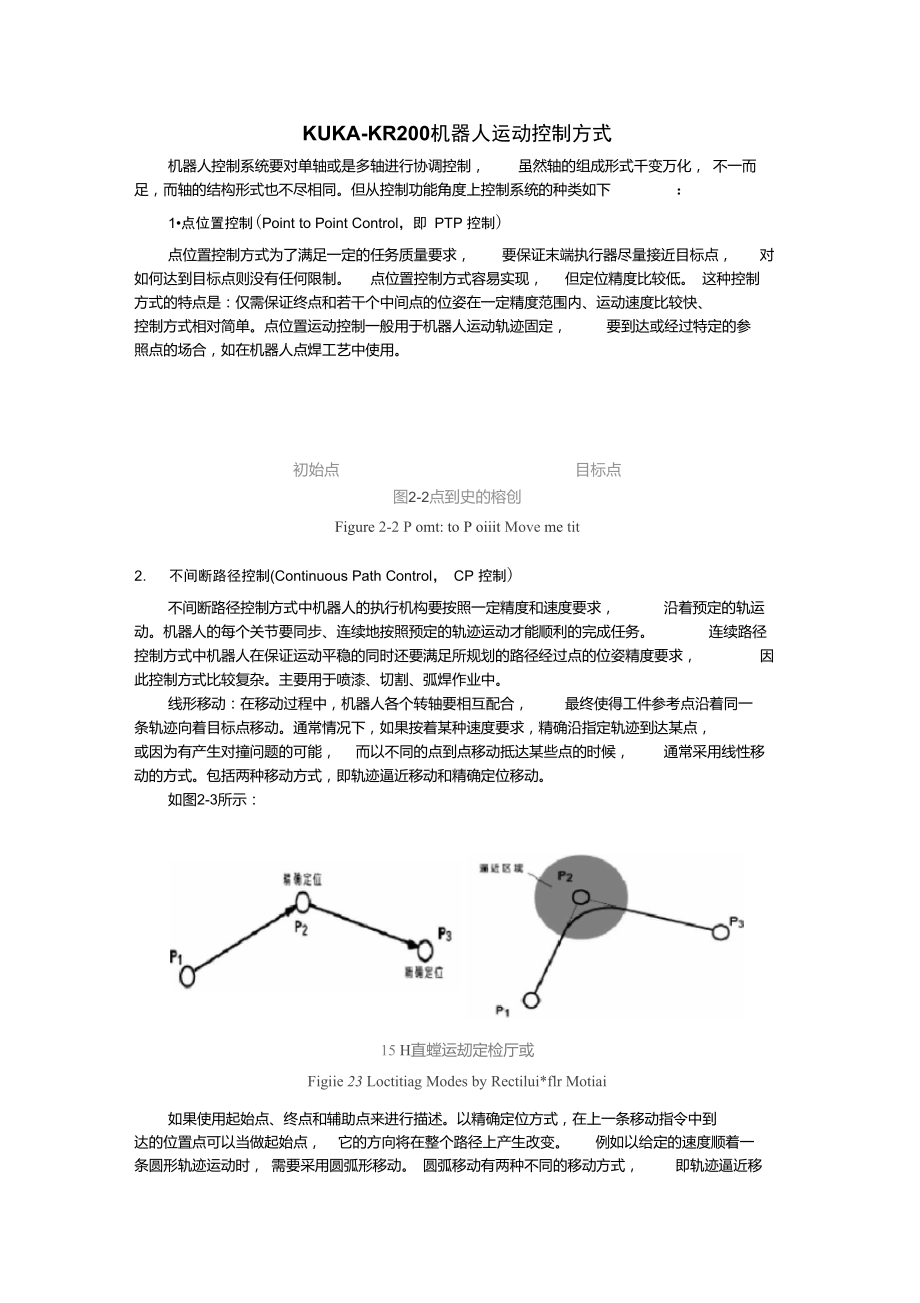
線形移動(dòng)
3��、:在移動(dòng)過(guò)程中����,機(jī)器人各個(gè)轉(zhuǎn)軸要相互配合, 最終使得工件參考點(diǎn)沿著同一
條軌跡向著目標(biāo)點(diǎn)移動(dòng)�。通常情況下�,如果按著某種速度要求,精確沿指定軌跡到達(dá)某點(diǎn)�, 或因?yàn)橛挟a(chǎn)生對(duì)撞問(wèn)題的可能, 而以不同的點(diǎn)到點(diǎn)移動(dòng)抵達(dá)某些點(diǎn)的時(shí)候�, 通常采用線性移
動(dòng)的方式。包括兩種移動(dòng)方式�,即軌跡逼近移動(dòng)和精確定位移動(dòng)。
如圖2-3所示:
15 H直螳運(yùn)刼定檢廳或
Figiie 23 Loctitiag Modes by Rectilui*flr Motiai
如果使用起始點(diǎn)���、終點(diǎn)和輔助點(diǎn)來(lái)進(jìn)行描述�����。以精確定位方式����,在上一條移動(dòng)指令中到 達(dá)的位置點(diǎn)可以當(dāng)做起始點(diǎn)�, 它的方向?qū)⒃谡麄€(gè)路徑上產(chǎn)生改變。
4、 例如以給定的速度順著一
條圓形軌跡運(yùn)動(dòng)時(shí)����, 需要采用圓弧形移動(dòng)。 圓弧移動(dòng)有兩種不同的移動(dòng)方式�����, 即軌跡逼近移
動(dòng)和精確定位移動(dòng)����。
如圖2-4和圖2-5所示:
團(tuán)2-4軌跡逼近慈功
Figine: 2-4 Orbit Apporcliing Motion
圖2d猜確定氈移動(dòng)
Figui飛 2*5 Preciwly Locfitng Motion
3. 隨行控制(Object Follow-up Control,即 OFC 控制)
高級(jí)機(jī)器人多使用對(duì)象隨行控制方法��, 采用多傳感器融合技術(shù)��, 根據(jù)機(jī)器人裝配過(guò)程中 的視覺(jué)�、力覺(jué)和觸覺(jué)等傳感信號(hào), 對(duì)末端執(zhí)行器的運(yùn)
5���、動(dòng)進(jìn)行控制����。 隨行控制方式進(jìn)行運(yùn)動(dòng)控 制更多的依賴于傳感器技術(shù)���,在工業(yè)機(jī)器人里使用比較少��,因?yàn)槭軐?shí)際工作環(huán)境的影響較大����。
4. 機(jī)體移動(dòng)的控制(Body Moving Conrtol,即 MC控制)
如果機(jī)器人不是固定的���,那么其工作范圍將大大擴(kuò)展同時(shí)對(duì)軌跡的控制難度也有了很大
的提升,若要以一定的速度實(shí)現(xiàn)規(guī)劃的軌跡�, 還要考慮機(jī)器人移動(dòng)因素的影響, 將機(jī)器人的
運(yùn)動(dòng)與機(jī)械手的運(yùn)動(dòng)進(jìn)行合成�,反向求解。也有必要具有一定的障礙回避功能和越野功能�����。 點(diǎn)位控制以及連續(xù)軌跡控制在工業(yè)機(jī)器人中是比較常見(jiàn)的��。 KUKA-KR200型機(jī)器人通過(guò)以上
兩種功能來(lái)實(shí)現(xiàn)多軸協(xié)調(diào)聯(lián)動(dòng)�����,并最終實(shí)現(xiàn)所需運(yùn)動(dòng)��。
 六軸機(jī)器人KUKA-KR200機(jī)器人運(yùn)動(dòng)控制方式
六軸機(jī)器人KUKA-KR200機(jī)器人運(yùn)動(dòng)控制方式